بلا حدود: ابتكار “المُرافق” الرائد لضعاف البصر
ورقة علمية  وصول مفتوح |
متاح بتاريخ:16 سبتمبر, 2025 |
آخر تعديل:16 سبتمبر, 2025
وصول مفتوح |
متاح بتاريخ:16 سبتمبر, 2025 |
آخر تعديل:16 سبتمبر, 2025
الملخص:
دفعت التطورات التكنولوجية الحديثة نحو ابتكار حلول جديدة لمساعدة ضعاف البصر على الملاحة. ورغم ذلك فلا تزال هناك تحديات في مجال تطبيق حلول الملاحة الذاتية من حيث الدقة والتكلفة والاعتماد على توفر الاتصال بالإنترنت. وتقدم هذه الورقة البحثية جهاز “المرافق” وهو جهاز ذكي مبتكر قابل للارتداء تم تصميمه بدقة عالية وهو مزود بأداة ذكاء اصطناعي مدمجة بالكامل لتحليل وتفسير المشاهد الداخلية. ويحوّل الجهاز صور البيئات الداخلية إلى رؤى عملية يقوم بصياغتها على شكل رسائل شفهية تُنقل مباشرةً عبر تقنية البلوتوث إلى المستخدم بلغته ولهجته المفضلة. وتُفصّل هذه الورقة البحثية تعقيدات برمجيات “المُرافِق” وأجهزته وتصميمه مُجسّدةً التكامل الاستثنائي للذكاء الاصطناعي المُدمج في الجهاز. ثم يتم إجراء تحليلٌ دقيقٌ للمُقارنة بين “المُرافِق” والحلول الحالية مع تسليط الضوء على براعته في اختراق القيود السائدة في السوق.
الكلمات المفتاحية: ضعف البصر، مُساعدة الملاحة، جهاز قابل للارتداء، حل الذكاء الاصطناعي المُدمج، تفسير المشهد.
1. المقدمة
لقد شهد مجال مساعدة ضعاف البصر على التنقل في السنوات الأخيرة ظهور حلول تكنولوجية متنوعة مثل مستشعرات ليدار (Lidar) وأنظمة التعرف على الصوت وخوارزميات معالجة الصور. إلا أن تطبيق هذه الحلول التكنولوجية في مجال الملاحة الذاتية لضعاف البصر يطرح تحديات كبيرة تتعلق بالدقة والتكلفة وسهولة الاستخدام. كما يحد اعتماد معظم الأنظمة الحالية على توفر الاتصال بالإنترنت من وظائفها في المناطق التي تفتقر إلى هذا الاتصال.
تقدم هذه الورقة البحثية جهاز “المرافق” وهو ابتكار رائد: إنه جهاز ذكي قابل للارتداء وهو مصمم لاكتشاف العوائق ودرجات السلالم والتعرف عليها. ويتميز جهاز “المرافق” بدعمه لتعدد اللغات وسهولة استخدامه التي لا تتطلب تدريبًا خاصاً فضلًا عن قدرته على العمل دون اتصال بالإنترنت مما يعزز الأداء ويضمن خصوصية المستخدم.
نستهل ورقتنا باستعراض موجز للمشهد التكنولوجي الحالي في مجال مساعدة ضعاف البصر على التنقل. ثم نقدم وصفًا شاملًا لجهاز “المرافق” وهو حلنا المبتكر الذي يشمل ميزات البرمجيات والأجهزة والتصميم. يلي ذلك تقديم تحليل مقارن دقيق بين نظام “المرافق” والحلول الأخرى المتاحة في السوق. وتُسلّط الورقة أخيرًا الضوء على الدور المحوري لنظام “المرافق” في إحداث ثورة في التكنولوجيا المساعدة الملاحية للأشخاص ذوي الإعاقة البصرية.
2. أحدث الحلول التكنولوجية في مجال الملاحة للأشخاص ذوي الإعاقة البصرية
يعاني حوالي 253 مليون شخص حول العالم من ضعف البصر وفقًا لإحصاءات منظمة الصحة العالمية لعام 2021 ومن بينهم 36 مليون كفيف و217 مليون من ضعاف البصر. وتُبرز هذه الإحصاءات الحاجة المُلحة إلى حلول التكنولوجيا المُساعدة الفعّالة وسهلة النفاذ لتحسين جودة حياة الأشخاص ضعاف البصر.
2.1. تطور الحلول المُساعدة
لقد شهد العقد الماضي طفرةً كبيرة في مجال تطوير الحلول المُساعدة المُخصصة لمساعدة الأشخاص ضعاف البصر في التنقل عبر البيئات الداخلية والخارجية. وقد ركزت الجهود على تعزيز إدراك المستخدم لما حوله أثناء التنقل وتحسين جودة حياته بشكل عام. وقد تم إجراء عدة دراسات استقصائية مثل تلك التي أجراها [1، 2] والتي قدمت تقييمًا دقيقًا للأجهزة المُساعدة القابلة للارتداء والمحمولة للمكفوفين وضعاف البصر مُسلّطةً الضوء على نقاط القوة والضعف.
2.2. الأجهزة الحسية/القائمة على الكاميرا
على الرغم من إمكاناتها الواعدة إلا أن الأجهزة البديلة الحسية وتلك التي تستخدم الكاميرات لم تشهد انتشارًا واسعًا في مجتمع ضعاف البصر. ولا يزال هناك تحديات عديدة لا سيما من حيث عدم القدرة على تطوير خرائط معرفية شاملة للبيئات المختلفة مما يعيق التنقل السلس ويعرقل استخدام هذه الحلول في الحياة اليومية [3، 4]. كما شكلت محدودية الدقة في البنى المقترحة عقبات متنوعة [5].
2.3. المنصات المحمولة والحلول السحابية
شهدت السنوات الأخيرة انتشارًا واسعًا للأبحاث المُخصصة لاستبدال الرؤية البشرية بالمستشعرات الحسية مستفيدةً في كثير من الأحيان من المنصات المحمولة وموارد الحوسبة السحابية لتخديم مجموعة واسعة من التطبيقات المساعدة. إلا أن الاعتماد على الاتصال بالإنترنت وحصر الاختبارات في بيئات مختبرية مُتحكم بها قد حدّا من انتشار استخدام هذه الحلول في المجتمع [6].
2.4. تكنولوجيا هجينة لتحسين التنقل
وبهدف سد الفجوة بين التكنولوجيا المساعدة الحالية وفهم المحتوى الدلالي على المستوى البشري فقد تم اقتراح تهجين حلول التكنولوجيا ودمج الرؤية الحاسوبية مع قدرات التعرف على الصوت المدمجة في الأجهزة القابلة للارتداء. ويهدف هذا التكامل إلى توفير جهاز مساعد متعدد الاستخدامات يعمل بدون استخدام اليدين ويكون مقبول من كل جوانبه لمجتمع ضعاف البصر [7، 8].
2.5. تكنولوجيا تحديد المسارات في المدن الذكية
تؤكد مبادئ التصميم الشامل في المدن الذكية على أهمية تكنولوجيا تحديد المسارات المُيسّرة لذوي الإعاقة. وبهدف الاستفادة من حلول الملاحة الداخلية والخارجية فقد أخذت الأماكن العامة بما في ذلك مراكز النقل ومراكز الترفيه والمعالم السياحية تتكيف مع هذه الحلول بشكل متزايد لضمان الشمولية وسهولة الوصول [9، 10].
2.6. التحديات التي تواجه الأجهزة المساعدة القابلة للارتداء
لطالما واجهت الأجهزة المساعدة القابلة للارتداء تحديات متعددة الأوجه مما أعاق انتشارها بين الأشخاص ضعاف البصر. وقد شكلت الإجراءات التشغيلية المعقدة والتكاليف المرتفعة ومحدودية الفعالية في العالم الحقيقي عوائق كبيرة أمام انتشار استخدامها في الحياة اليومية [1، 12]. كما أعاقت العوامل الاجتماعية والنفسية بما في ذلك التردد في تبني التكنولوجيا الجديدة، قبول المستخدمين لها.
إن من أبرز التحديات التي تواجه الحلول الحالية اعتمادها على الاتصال بالإنترنت. حيث يقيد هذا الاعتماد حرية المستخدم وخصوصيته إذ قد لا يكون الاتصال الدائم بالإنترنت مُتاحًا أو مُفضّلًا لديه عند التنقل بين بيئات مُختلفة. وبالإضافة إلى القيود العملية التي فرضها هذا الأمر فقد أثار أيضًا مخاوفاً بشأن خصوصية المستخدمين واستقلاليتهم مما قد يُعيق التبني السلس لهذه الحلول في الحياة اليومية.
3. “المرافق”: جهاز قابل للارتداء مزود بحلول الذكاء الاصطناعي المتكاملة للمكفوفين
يُعدّ نظام “المرافق” حلاًّ رائداً مُصمّماً للتغلب على التحديات التي يواجهها أكثر من 253 مليون شخص من ذوي الإعاقة البصرية حول العالم. ففي حين لا يزال معظمهم يعتمدون على العصي البيضاء إلا أنهم يظلون عُرضةً للاصطدامات وحوادث السلالم وفقدان الاتجاه. وفي الوقت نفسه تواجه أقليةٌ ممن لديهم إمكانية الوصول إلى التكنولوجيا وخاصةً الهواتف الذكية تعقيداتٍ في مجال سهولة الاستخدام حيث يكون مطلوباً منهم إتقان العمل على البرنامج والاتصال بالإنترنت. ولسد هذه الثغرات، يُقدّم “المرافق” حلاً شاملاً وآمناً. يستخدم نظامنا كاميرا زمن الرحلة (TOF) لالتقاط البيئة المحيطة في الوقت الفعلي مع توظيف الذكاء الاصطناعي المُصمّم خصيصاً لاكتشاف مختلف العوائق. ثم يتم نقل المعلومات المهمة إلى المستخدمين بلغتهم ولهجتهم المُفضّلة. وتكمن الميزة الرئيسية لنظام “المرافق” في القدرة على تشغيله دون اتصال بالإنترنت مما يضمن سلامة المستخدم واستقلاليته حتى في المناطق التي لا تتوفر فيها شبكة الانترنت. كما أنه يتميز بسهولة الاستخدام ولا يتطلب معرفة تقنية مسبقة فما عليك سوى التشغيل والاستماع.
3.1. “المرافق”: جهاز ذكي رائد قابل للارتداء
إن “المرافق” هو جهاز ذكي قابل للارتداء مزود بذكاء اصطناعي متخصص لتحليل وتفسير المشاهد المحيطة بالأشخاص ذوي الإعاقة البصرية. ويعالج هذا الجهاز معلومات حيوية وينقلها شفهيًا إلى المستخدم عبر سماعة أذن بتقنية البلوتوث. ويتميز “المرافق” بقدرته على اكتشاف المكونات والتعرف عليها في البيئات الداخلية والخارجية. كما يوفر الجهاز خيار العمل دون الحاجة للاتصال بالإنترنت مما يضمن خصوصية المستخدم وأداءً أفضل للنظام ووظائفه في أي مكان كما يوفر خدماته بلغات متعددة بالإضافة إلى سهولة استخدامه حيث لا يتطلب تشغيله تدريبًا مسبقاً.
وقد تم تزويد الجهاز بكاميرا زمن الرحلة (TOF) وسماعة أذن بتقنية البلوتوث وبطارية قابلة لإعادة الشحن (انظر الشكل 1). كما يتميز “المرافق” بوزن خفيف وأبعاد مريحة للمستخدم.
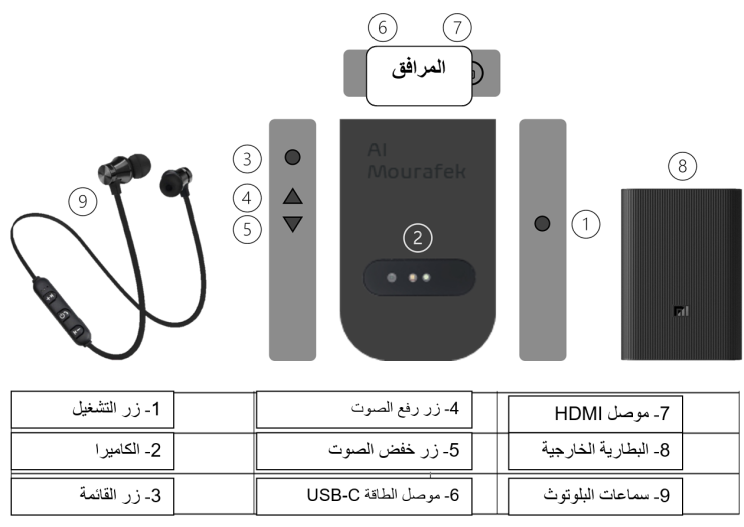 الشكل 1. جهاز “المرافق” الأساسي.
الشكل 1. جهاز “المرافق” الأساسي.
3.2. ملحقات توفر تجربة مستخدم مُحسّنة
صُمم جهاز “المُرافَق” ليوفر تجربة استخدام بسيطة ومرنة وسهلة دون استخدام اليدين. حيث يُمكن ارتداء الجهاز بشكل سري كقلادة أو تعليقه على إكسسوارات مثل الوشاح (انظر الشكل 2). ولا يتطلب الجهاز أي تدخل جسدي أثناء الاستخدام مما يسمح للمستخدم بالتركيز التام على حركاته. كما يمكن تفعيل واجهة المستخدم بضغطة زر بسيطة ويتم بعدها إرسال الملاحظات الصوتية عبر سماعة أذن تعمل بتقنية البلوتوث.
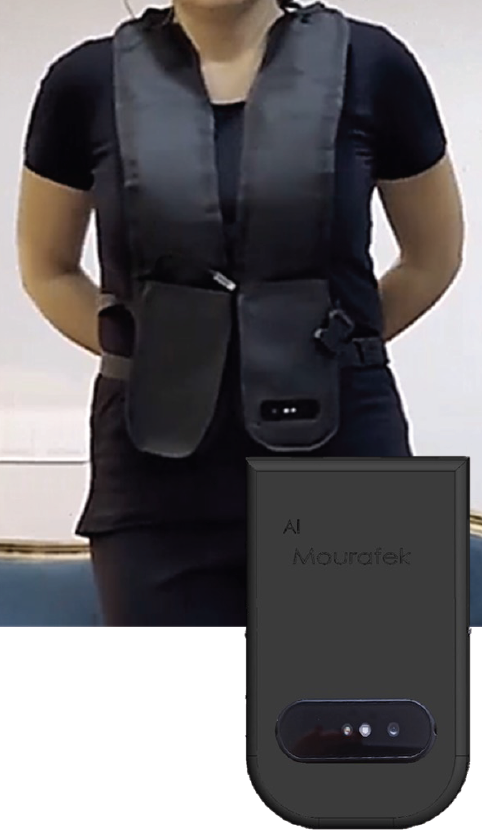
الشكل 2. تركيب جهاز “المرافق” على الوشاح.
3.3. اتباع نهج تطوير يُركّز على المستخدم
يعتمد جهازنا بشكل كبير على خوارزمياتنا المبتكرة التي أثبتت ثوريتها من خلال العديد من الأوراق البحثية التي نشرناها [13-19]. وتلعب خوارزمياتنا دورًا كبيرًا في منحنا ميزة تنافسية كبيرة إذ تُمكّننا من اكتشاف جميع أنواع العوائق بكفاءة وسرعة وخاصةً صعود ونزول السلالم والعوائق المُعلّقة التي غالبًا ما تُشكّل خطرًا جسيماً حتى مع الحلول المُتاحة حاليًا.
ويعتمد النهج المُبتكر المُتّبع في جهازنا على استخدام كاميرا زمن الرحلة (TOF) لالتقاط المشاهد المحيطة في الوقت الفعلي لمصلحة الأشخاص ذوي الإعاقة البصرية. ويستفيد نظامنا من تقنيات مُعالجة الصور المُتقدّمة والذكاء الاصطناعي (AI) لتحليل وتفسير البيانات البصرية وبيانات العمق.
يتم التقاط المشهد المحيط بالكامل باستخدام كاميرا زمن الرحلة (TOF) بمجال رؤية 86°*68° ومدى 6 أمتار مما يوفر نوعين من الصور: صورة بالأشعة تحت الحمراء (IR) وصورة عمق (Depth). ثم تعمل خوارزميات الرؤية الحاسوبية والتعلم العميق على تقسيم المشهد وتحديد عناصره المختلفة على التوالي مثل العوائق والمسارات المفتوحة والأجسام وغيرها. وفي الواقع يخضع كل نوع من الصور لمعالجة متوازية محددة كما هو موضح في الشكل 3.
يُعدّ تطبيق “المرافق” أداةً فريدةً قادرةً على إجراء تحليل فوريّ للمشاهد الملتقطة دون الحاجة للاتصال بالإنترنت مما يوفر خدمات أساسيةً لضعاف البصر بما في ذلك اكتشاف العوائق ووصف المشاهد المحيطة. فهو لا يضمن سلامتهم فحسب بل يُرسّخ مكانته كرفيقٍ حقيقيّ للمستخدم تتجاوز مهمته مجرد كشف العوائق إلى تقديم المساعدة الشاملة.
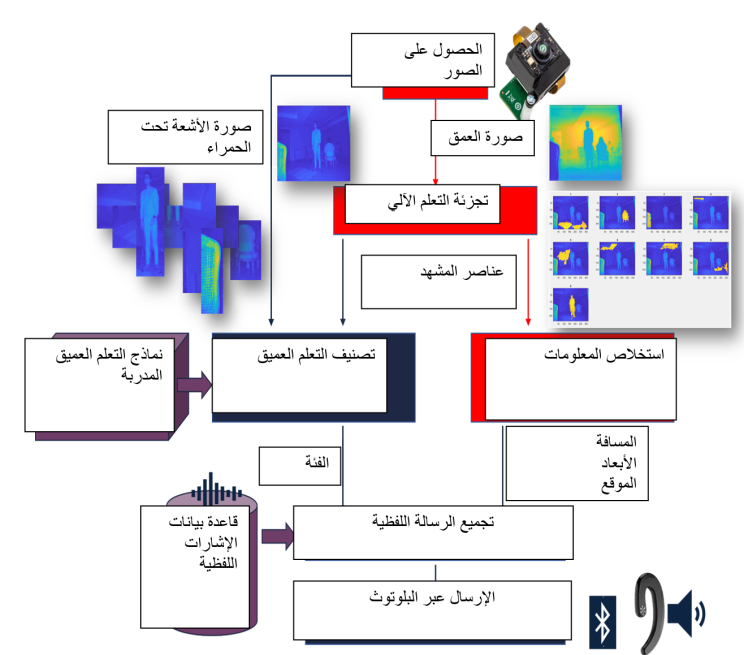 الشكل 3. مخطط انسيابي لمنهج الرؤية الحاسوبية لدينا لفهم وتفسير المشاهد المطلوبة في الوقت الفعلي.
الشكل 3. مخطط انسيابي لمنهج الرؤية الحاسوبية لدينا لفهم وتفسير المشاهد المطلوبة في الوقت الفعلي.
لقد جاء تطوير وتصميم منتجنا نتيجة دراسة شاملة لاحتياجات الأفراد ضعاف البصر مما يضمن أن يظل “المرافق” بمثابة الرفيق المثالي لضعاف البصر على الدوام.
4. الخاتمة
في إطار سعيها للتغلب على التحديات التي تواجهها الوسائل الحالية لمساعدة الأشخاص ضعاف البصر على الملاحة قدمت هذه الدراسة جهاز “المرافق” وهو جهاز نوعي قابل للارتداء مزود بذكاء اصطناعي متقدم وتقنية كاميرا زمن الرحلة (TOF). كما أن قدرة “المرافق” على العمل دون وجود اتصال بالإنترنت تعزز السلامة والخصوصية وتوفر تحليل فوري للمشهد مع مساعدة بلغات متعددة.
ولا تقتصر ميزات هذا الجهاز المبتكر المصمم من خلال نهج يركز على المستخدم على تجاوز محدودية وسائل المساعدة الحالية حيث يقدم الجهاز للمستخدم أيضًا قابلية التكيف من خلال إمكانية ارتدائه على الأوشحة أو دمجه في ملحقات العصا البيضاء.
يُجسد “المرافق” من خلال توظيفه لأحدث العلوم واستخدامه للتصميم الموجه للمستخدم مستقبل التكنولوجيا المساعدة الذي يعد بمزيد من الاستقلالية والإدماج المجتمعي وجودة حياة أفضل للأشخاص ضعاف البصر على نطاق عالمي. وتشير التطورات العلمية إلى تحول جذري في مجال وسائل المساعدة على الملاحة مما يُبشر بعصر من التمكين وسهولة الوصول للملايين من الأشخاص.
شكر وتقدير
يتقدم المؤلفون بجزيل الشكر لمركز (ICUBE) و (Novation City) على دعمهما القيّم في المراحل الأولى من تطوير النموذج الأولي لجهاز “المرافق”. كما يتقدمون بشكر خاص لبرنامج مدى للابتكار 2023 الذي مكّننا تمويله وتوجيهه من تطوير أحدث نسخة من النموذج الأولي بنجاح مما أتاح التحقق من صحة الحل المقترح في سيناريوهات واقعية.
5. المراجع
[1] Ruxandra, T., Bogdan, M., and Titus, Z. (2018)
Wearable assistive devices for visually impaired: a state-of-the-art survey. Pattern Recognition Letters 2018
[2] Khan, S., Nazir, S. and Khan, H. (2021). Analysis of Navigation Assistants for Blind and Visually Impaired People: A Systematic Review. IEEE Access. 9. 10.1109/ACCESS.2021.3052415.
[3] S. A. Cheraghi, V. Namboodiri, and L. Walker, “GuideBeacon: Beaconbased indoor wayfinding for the blind, visually impaired, and disoriented,” in Proc. IEEE Int. Conf. Pervas. Comput. Commun. (PerCom), Mar. 2017, pp. 121-130.
[4] J. Ma and J. Zheng, (2017)
High precision blind navigation system based on haptic and spatial cognition, in Proc. 2nd Int. Conf. Image, Vis. Comput. (ICIVC), Jun. 2017, pp. 956-959.
[5] J. P. Gomes, J. P. Sousa, C. R. Cunha, and E. P. Morais, (2018)
An indoor navigation architecture using variable data sources for blind and visually impaired persons, in Proc. 13th Iberian Conf. Inf. Syst. Technol. (CISTI), Jun. 2018, pp. 1-5.
[6] M. Nakajima and S. Haruyama, (2012)
Indoor navigation system for visually impaired people using visible light communication and compensated geomagnetic sensing, in Proc. 1st IEEE Int. Conf. Commun. China (ICCC), Aug. 2012, pp. 524-529.
[7] G. Yang and J. Saniie, “Indoor navigation for visually impaired using AR markers,” in Proc. IEEE Int. Conf. Electro Inf. Technol. (EIT), May 2017, pp. 1-5.
[8] C. Manlises, A. Yumang, M. Marcelo, A. Adriano, and J. Reyes, “Indoor navigation system based on computer vision using CAMShift and D* algorithm for visually impaired,” in Proc. 6th IEEE Int. Conf. Control Syst., Comput. Eng. (ICCSCE), 2016, pp. 481-484.
[9] van der Bie, J., Ben Allouch, S., and Jaschinski, C. (2019).
Communicating Multimodal Wayfinding Messages for Visually Impaired People via Wearables, in Proceedings of the 21st International Conference on Human-Computer Interaction with Mobile Devices and Services (New York City, NY: Association for Computing Machinery), 1–7.
[10] Shahbaz, A., (2023)
Wayfinding and indoor navigation for persons with visual impairments: an overview of support innovations by Mada, (2023), Nafath-Issue 22, CC BY-NC 4.0.
[11] T. H. Riehle, S. M. Anderson, P. A. Lichter, W. E. Whalen, and N. A. Giudice, (2013)
Indoor inertial waypoint navigation for the blind, in Proc. 35th Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. (EMBC), Jul. 2013, pp. 5187-5190.
[12] U. Yayan, F. Inan, F. Guner, U. G. Partal, A. Kale, and A. Yazici, (2015)
Indoor mobile navigation software for blind people,” in Proc. 23nd Signal Process. Commun. Appl. Conf. (SIU), May 2015, pp. 666-669.
[13] Medhioub, M., Khanfir Kallel, I., Ammar Bouhamed, S., Derbel, N., Solaiman, B.and Kanoun, O. (2021),
Electronic embedded system for stair recognition based on possibilistic modeling of ultrasonic signal, IEEE Sensors Journal, Volume: 21, Issue: 5, pp: 5787 – 5797 March1, 1 2021.
[14] Charfi, A., Ammar Bouhamed, S., Bossé, E., Khanfir Kallel, I., Bouchaala, W., Solaiman, B. And Derbel, N. (2020)
Possibilistic Similarity Measures for Data Science and Machine Learning Applications, IEEE Access 8: 49198-49211.
[15] S. Ammar Bouhamed, I. Khanfir Kallel, R. R. Yager, É. Bossé and B. Solaiman, (2020)
An intelligent quality-based approach to fusing multi-source possibilistic information”, Information Fusion, Volume 55C, 2020, Pages 68-90.
[16] I. Khanfir Kallel, S. Almouahed, B. Alsahwa and B.Solaiman, (2019)
The use of contextual spatial knowledge for Low-quality Image Segmentation”, Multimedia Tools and Applications, 78: 9645.
[17] J. Frikha Elleuch, D. Sellami and I. Khanfir Kallel, (2016)
Indoor/ outdoor navigation system based on possibilistic traversable area segmentation for visually impaired people”, Electronic Letters on Computer Vision and Image Analysis 15(1), pp.60-76.
[18] J. Frikha Eleuch, I. Khanfir Kallel, D. Sellami Masmoudi, (2013)
New ground plane segmentation method for electronic cane”, Journal of Image and Graphics, (JIG), Vol. 1, No. 2, pp. 72-75.
[19] S. Ammar Bouhamed, I. Khanfir Kallel, D. Sellami Masmoudi. (2013)
New electronic white cane for stair case detection and recognition using ultrasonic sensor”, International Journal of Advanced Computer Science and Applications, (IJACSA), Vol. 4, No. 6, pp. 243-256.