مراجعة لأنظمة الروبوتات المتوفرة لمساعدة الأشخاص ذوي الإعاقة البصرية.
ورقة علمية  وصول مفتوح |
متاح بتاريخ:25 يناير, 2022 |
آخر تعديل:30 يناير, 2022
وصول مفتوح |
متاح بتاريخ:25 يناير, 2022 |
آخر تعديل:30 يناير, 2022
نبذة
ازدادت حاجة الأشخاص ذوي الإعاقة إلى الروبوتات المساعدة بشكل كبير في هذا الوقت من العمر وخصوصاً الأشخاص ذوي الإعاقة البصرية حيث يستمر عددهم في الارتفاع. بالنسبة لهم ، يمكن أن يتم تحقيق العيش المستقل بواسطة روبوت مساعد وهو أحد أجهزة التكنولوجيا المساعدة الرئيسية التي يمكن أن تساعد في استعادة الكرامة والثقة بالنفس. وتستعرض هذه الورقة آحدث التوجهات الحالية في مجال تصميم وتطوير روبوت المساعد الشخصي الذي يستخدم خوارزمية علمية معينة لاكتشاف وتقدير الموقع النسبي للكائنات في بيئة داخلية باستخدام التعليمات الصوتية. وتحتوي هذه الروبوتات شبه البشرية على العديد من الكاميرات عالية الدقة في أجزاء مختلفة من بنيتها. ويتم تنفيذ الحركة المستقلة واكتشاف الأشياء وقياس المسافة وتخطيط الحركة باستخدام هذه الكاميرات. علاوة على ذلك، فإنه يمكن زيادة فائدة الروبوت من خلال إبقاء المستخدم على اطلاع بنتائج أفعاله.
مقدمة
يتزايد عدد الأشخاص ذوي الإعاقة البصرية بشكل سريع جنبًا إلى جنب مع النمو السكاني الإجمالي. ووفقًا لمنظمة الصحة العالمية، هناك أكثر من 2.2 مليار شخص مكفوفين أو ضعاف البصر (منظمة الصحة العالمية، 2021) من بينهم 36 مليون شخص مكفوفين (ألبوجامي وآخرون، بدون تاريخ). ويعد فقدان البصر أمرًا شائعًا لا يمكن التنبؤ به، أما التنقل الآمن في بيئة الحياة اليومية فيعد من أهم التحديات في هذا المجال. ولمعالجة هذه المشكلة، هناك نوعان شائعان من أجهزة التكنولوجيا المساعدة للتنقل داخل المنزل وخارجه.
تعتمد أجهزة الملاحة الخارجية بشكل عام على تكنولوجيا نظام تحديد المواقع العالمي (GPS). وتتوفر بعض الأنظمة مثل العصي البيضاء المزودة بوظيفة GPS إضافة إلى استخدام كلاب الإرشاد على نطاق واسع لمساعدة الأشخاص ذوي الإعاقات البصرية في اكتشاف الأشياء والتنقل في كل من البيئات الداخلية والخارجية. ومع ذلك، وفي كثير من الحالات في منطقة الشرق الأوسط، يعتمد المكفوفون وذوي الإعاقة البصرية بشكل كبير على مساعدة الآخرين لأداء مهامهم اليومية. وقد تم تطوير تكنولوجيا الذكاء الاصطناعي المتقدمة وأجهزة التعلم العميق في الآونة الأخيرة للمساعدة في رفع القدرة على اكتشاف الأشياء في البيئة المحيطة وتطوير نظام تنبيه للمساعدات الذكية للحياة اليومية وأوقات تناول الأدوية واقتراح الطرق الممكنة والتعرف على الوجوه والأشياء. ويستخدم هذا النوع من عمليات التعرف تكنولوجيا التعرف على الوجه والأشياء المشابهة لتلك المستخدمة في الهواتف الذكية. ومن ثم تم تطوير أنظمة الروبوتات وإتاحتها للاستفادة من هذه التطورات التكنولوجية لمساعدة الأشخاص ذوي الإعاقة البصرية.
الروبوتات المساعدة للتنقل
أصبحت الأنظمة القائمة على نظام تحديد المواقع العالمي (GPS) بالنسبة للأشخاص المبصرين فعالة بشكل متزايد للاستخدام في الملاحة الخارجية، ومع ذلك، لا يزال التنقل الداخلي يشكل مشكلة بلا حل. فيمكن للأشخاص المبصرين الاعتماد بسهولة على الإشارات المرئية للوصول إلى الوجهات في المباني الكبيرة مثل مراكز التسوق والمطارات، ولكن بالنسبة للمكفوفين، يمثل التنقل الداخلي تحديًا كبيرًا (فينج وآخرون ، 2015).
وقد تم تطوير الروبوتات للمساعدة في التنقل في المساحات الداخلية من خلال الأوامر الصوتية والتعرف على الاشياء باستخدام واجهة برمجة التطبيقات السحابية. وتم تجهيز أجهزة الروبوت هذه بجهاز استشعار بصري يستخدم كاميرات متعددة عالية الدقة ومكتشفات المسافة الليزرية ومكبر صوت يعطي إحصاءات للأشخاص ضعاف البصر حول محيطهم. ويتم تحليل بيانات الليزر المسجلة باستخدام تقنية تجميع البيانات التسلسلي مما يجعل من الممكن اكتشاف العوائق والخطوات والسلالم (الشكل 7). كما يمكن لهذا النظام التمييز بين الأدوات والأشخاص عن طريق استخدام المستشعر البصري. وتقوم المعالجات المدمجة بتحليل معلومات المستشعرات وتنقل السجلات إلى المستخدمين عن طريق اللغة الطبيعية أو الإشارة الصوتية.

الشكل 1: سيدة كفيفة تمشي مع الروبوت كدليل مبصر
بالإضافة إلى ذلك، يتم تدريب أنواع أخرى من الروبوتات باستخدام أشياء مختلفة في البيئة الداخلية، حيث يتم إرسال أوامر صوتية إلى الروبوت عبر مساعد جوجل للعثور على الأشياء التي يحتاجها المستخدم. وباستخدام الأوامر الصوتية، يجد الروبوت الهدف والكائن المرجعي، ويوفر للمستخدم بنجاح الموقع النسبي لهذا الهدف (الشكل 8). وتعمل الروبوتات بشكل عام كمساعدين شخصيين للمكفوفين في المساحات الداخلية.
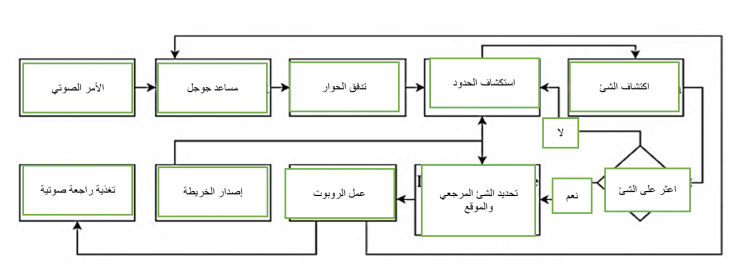
الشكل 2: نموذج تقليدي لعمل نظام الروبوت المساعد لاكتشاف الأشياء عبر الأوامر الصوتية
روبوت الذكاء الاصطناعي المستقل
تم تطوير هذا الروبوت بواسطة جامعة كاليفورنيا (حيوان الشيتا المصغر: دليلك إلى عالم الروبوتات”، 2021) وتُعرف باسم حيوان الشيتا المصغر. ولهذا الروبوت أربعة أرجل وهو مجهز بنظام رسم الخرائط بالليزر وكاميرات وأجهزة استشعار لتوجيه الأشخاص ذوي الإعاقة البصرية بأمان في الخارج. ويمكن لهذا الروبوت أن يوجه مستخدمه بأمان عبر شوارع صعبة وضيقة وبها العديد من الحواجز تمامًا مثل كلب الإرشاد الحقيقي (الشكل 9). كما يمكنه يمكن أن يرسم أيضًا للمستخدم أقصر طريق متاح مما يقلل من وقت التنقل ويوفر المسار الذي يحتوي على أقل عدد من العوائق.

الشكل 3: حيوان الشيتا المصغر، روبوت الذكاء الاصطناعي المستقل
روبوت التوجيه
يتم استخدام هذا الروبوت في مستشفى كاناجاوا لإعادة التأهيل باليابان بغرض توجيه المرضى ذوي الإعاقة البصرية والمكفوفين. وينتقل هذا الروبوت إلى هدفه بالاعتماد على القوة التي يدفعه بها المستخدم (توبيتا، ساجاياما وأوجاوا، 2017). وفي بيئة خالية من العوائق، مثل المستشفيات، يقوم هذا الروبوت بمرافقة الأشخاص ذوي الإعاقة البصرية إلى وجهاتهم بأمان. ونتيجة لذلك، فإن معايير تصميم الروبوت تشمل كل من آلية الحركة ذات العجلات والتوطين وتوليد المسار المختار وتجنب العقبات والإعلانات الصوتية وواجهة الإدخال التي لا تعتمد على البصر (الشكل 10).

الشكل 4: روبوت إرشادي للمرضى ذوي الإعاقة البصرية والمكفوفين في اليابان
الخاتمة
إن هناك العديد من المشاريع والمصنّعين الذين استكشفوا استخدام الروبوتات لتحل محل الوسائل المساعدة على الحركة الشخصية للمكفوفين أو المساعدين الشخصيين في أعقاب الاتجاه الجديد الناجح لحلول تكنولوجية مختلفة مثل الأجهزة المحمولة يدوياً مثل العصا البيضاء المجهزة برادار وتكنولوجيا تحديد المسارات والمشايات الآلية للمكفوفين المتقدمين في السن من ذوي الصعوبات الحركية. ومع ذلك، ومع التطور الأخير للذكاء الاصطناعي وإنترنت الأشياء والتكنولوجيا السحابية والجيل الخامس والأنظمة الروبوتية، فقد تم اعتماد توجه جديد من قبل صناع التكنولوجيا لبناء روبوت جديد لديه القدرة على التغلب على التحديات التي تواجه الأشخاص ذوي الإعاقة البصرية والمكفوفين في حياتهم وأنشطتهم اليومية. إن هذه الأنظمة الروبوتية ذكية للغاية ويمكن تدريبها وتخصيصها لتناسب أفراد معينين أو يمكن استخدامها في مناطق الخدمات العامة مثل المطارات حيث يتنوع المستخدمون وأغراض الاستخدام.
المراجع:
Albogamy, F., Alotaibi, T., Alhawdan, G., & Faisal, M. (n.d.). SRAVIP: Smart Robot Assistant for Visually Impaired Persons. IJACSA) International Journal of Advanced Computer Science and Applications, 12(7), 2021. Retrieved September 6, 2021, from www.ijacsa.thesai.org
Feng, C., Azenkot, S., & Cakmak, M. (2015). Designing a Robot Guide for Blind People in Indoor Environments. ACM/IEEE International Conference on Human-Robot Interaction, 02-05-Marc, 107–108. https://doi.org/10.1145/2701973.2702060
Mini Cheetah – ROBOTS: Your Guide to the World of Robotics. (2021). Retrieved 5 September 2021, from https://robots.ieee.org/robots/minicheetah/
Tobita, K., Sagayama, K., & Ogawa, H. (2017). Examination of a Guidance Robot for Visually Impaired People. Journal Of Robotics and Mechatronics, 29(4), 720-727. doi: 10.20965/jrm. 2017.p0720
Vision impairment and blindness. (2021). Retrieved 5 September 2021, from https://www.who.int/news-room/fact-sheets/detail/blindness-and-visual-impairment